
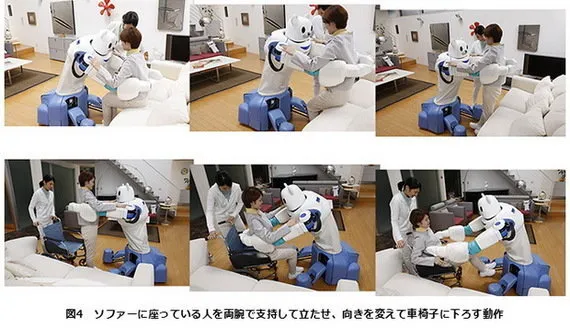
理化学研究所が介護用ロボット ROBEAR を発表しました。被介護者の身体を柔らかく抱え上げ、ベッドから車椅子へ移乗させるなどの介助作業を行います。
介護の現場では要介護者を抱え上げる、あるいはまっすぐの姿勢に立たせるといった力仕事が必要です。理化学研究所ではこうした重労働が介護士不足の一因になっているとして、介護者の身体的負荷が高い労働を人間の代わりに行うロボットの開発を進めています。
ROBEAR を開発したのは、理研と住友理工が共同設立した「理研-住友理工人間共存ロボット連携センター」。名前の通り、頭部はクマを象った愛らしいデザインです。
同センターはこれまでに「RIBA」(2009)と「RIBA-II」(2011)という2世代の介護用ロボットを開発してきました。ROBEARはRIBAシリーズの後継機。被介護者が不安を感じないように、柔らかく接触するという機能はROBEARから新たに備えた特徴です。
これは駆動系(ACサーボモーター、ギア、モータードライバ)と制御・通信用のモジュールを一体化させたアクチュエータユニットとし、このうちギアには減速比が10分の1程度の高効率ギアを用いることで、前世代と比べて各関節の回転速度を2.5~10倍、精度を4~30倍ほど向上させたことにより可能になりました。

柔らかい接触のキモとなるのは、アクチュエータの出力側から受けた力が入力側へ伝わる「バックドライバビリティ」という性質。理化学研究所ではこれについて「ロボットのリンクに外界から加わった力がモータに伝わることで、リンクが外界と衝突・接触したときに柔らかさを実現できる」と説明しています。
また、人を抱き抱える、自立できるように支えるといったように、人間と接触しながら動作を行うため、接触状態を検知する3種類の力覚センサーを搭載しました。1つ目は、ひずみゲージを用いた「6軸力/トルクセンサー」、2つ目は、関節のモーターを流れる電流から関節のトルク(ねじりの強さ)を推定する「電流トルク推定器」、3つ目は皮膚に相当するゴム製の「触覚センサ(スマートラバーセンサー)」。これらのセンサーが荷重の変化を検知することで、出力を適切に調節した動作が可能です。
ROBEARでは旧世代から設計を大きく見直しており、結果として重量がRIBA-IIの約230kgから約140kgへと大幅に低減されました。サイズは800×800×1500mm(幅×奥行き×高さ)。ROBEARは今後、柔軟介護やリハビリ応用を目指し、研究用のプラットフォームとして活用されるとのことです。
経済産業省と厚生労働省は2013年に「ロボット技術の介護利用における重点分野」を策定しました。これは被介護者の動作や、介護者による見守りを支援する手段として、ロボット技術を用いた装着型もしくは非装着型機器の開発・実用化に係る重点分野を示したもので、この中の一分野に移乗介助が含まれています。
移乗介助用のロボットとしては現在、装着型のいわゆるロボットスーツ、マッスルスーツのほか、非装着型のパワーアシスト装置などが存在します。具体例は独立行政法人産業技術総合研究所を中心としたコンソーシアムが運営する介護ロボットポータルサイトでいくつか紹介されています。
若い世代が減り、高齢者の割合が増えるこれからの日本において、介護は多くの人にとっていつかは直視しなければならないテーマです。直近で必要とはしていなくとも、介護者の負担を技術で軽減する取り組みとその現状について知っておけば、将来何かの役に立つかもしれません。
(2015年2月25日Engadget日本版「理研、クマ型の介護ロボットROBEARを発表。柔らかな抱っこや移乗に対応」より転載)
【関連記事】