
{kind=link}

ロボットといえば「Pepper」を思い浮かべる方も多いことでしょう。
しかし、株式会社人機一体の代表取締役社長であり、立命館大学 ロボティクス研究センター 客員教授でもある金岡博士は「あれがロボットだとは思ってほしくない」と話します。
博士が現在実用化を目指しているのは、人が搭乗して動かす巨大ロボット。ロボット技術はもっと人の役に立てるはずだと研究の世界を飛び出し会社を立ち上げた博士は、この巨大ロボットを世に送り出そうと奔走しています。
ロボットは私たちの暮らしをどう変えていくのか、金岡博士 が描く未来を伺いました。
{kind=link}

Pepperがロボットでないのなら、何がロボットなのか?
--------「Pepperはロボットではない」というのはどういうことでしょうか?
金岡博士 Pepperを否定するわけではないんです。Pepperのようにエンターテイメントで利益を出せるのならビジネスとしては成功で、それに対して他人がどうこう言う問題ではないと思います。私もベースは研究者ですが現在はビジネスの世界にいますし、企業が利益を追求するのは当然のことだと思います。
ただ、ロボット制御工学者の立場から言えば、ロボットがああいうものだとは思われたくないというのが本音です。
ロボットは本来フィジカルなものです。何らかの力学的な仕事をすることで人の役に立つもの、要は、動いてなんぼということです。
Pepperは確かに動きますが、その動作で人が楽しむことはあっても、人に役立つ力学的な仕事をするとは思えません。人のために力学的な作用を外界に及ぼすことが主な機能として備わっていないという点で、Pepperは我々の考えるロボットとは違うということです。
--------もし、Pepperが人の代わりに重たいものを持ち上げたら、それはロボットと呼んでもいいということでしょうか。
金岡博士 そうでしょうね。難しいところですけどね。昔からロボットとは何かという議論は色々なところでされていますが、明確な定義はないのが現状です。私はロボットの定義なんて決めなくていいと思っていますけどね。
大事なのはそれがロボットかどうかではなく、人の役に立つかどうかです。何と呼ぶかは見た人が決めればいい。ただ、Pepperが本来ロボットの持つべき機能を充分に備えているかと考えると、ロボットとはそんなものではないと言いたくなるのです。
--------もっとロボットにはできることがあると?
金岡博士 はい。エンターテイメントは重要な分野ではありますが、ロボットが働く可能性のあるニッチな一分野に過ぎません。ロボットが本当に必要とされているのはもっと地道で泥臭い、人が過酷な作業を強いられている「現場」です。
そうした部分を抜きにして、エンターテイメントというニッチ市場だけでロボットを語るのは難しいと思います。
--------過酷な作業というと建設現場や工場をイメージしますが、そういうところで使われる重機はロボットとは違いますよね。
金岡博士 明確にどこまでがロボットかと線引きする必要はないと思いますが、高度な力学的機能を持っていて、器用に動ける機械がロボットだと考えればいいでしょう。バーンと力を出すだけで、大雑把な動きしかしない重機であれば、ロボットとは言いにくいですね。
たとえば、自動車でも単純にブーンと走るだけだとロボット的ではありませんが、最近の自動運転に代表されるようなインテリジェントな機能がついてくれば段々ロボットらしくなる。大きな力を出すだけでなく、その力を巧緻かつ知的にコントロールできるようになっていくとロボット化していくとは言えますね。
{kind=link}

機械は機械。愛着がロボットをダメにする
--------博士がつくっているロボットは人が操作することが特徴のひとつだそうですね。なぜ、コンピューターが完全に操る自律型のロボットにしなかったのですか。
金岡博士 理由はふたつあります。ひとつは実環境におけるロボットの完全自律制御が想像以上に難しいからです。
テレビに出ているロボットを見ると、もう簡単に動かせるように思うでしょう。でも実は、そういうロボットは環境まで含めてデモンストレーション用に相当つくり込んであるから上手く動くのであって、我々が思うようなレベルでコンピューターにロボットを操らせるのはまだ難しいのです。
もうひとつの理由はその裏返しですが、人間のボディコントロール能力のすごさに気付いたことです。
人は、現在のロボットとは比較にならないくらい器用に身体をコントロールし、複雑な動作を難なくこなします。人間にこれほど優れたコントロール能力があるのなら、それを活用しない手はありません。
機械には機械のいいところ、人には人のいいところがある。双方を活かせば、人間よりも機械よりもすごいものができると考えました。それを我々はマンマシンシナジーエフェクタ(MMSE)と呼んでいます。
------機械のいいところと言うと?
金岡博士 「強い・速い・正確」ですね。人間では出せない大きな力で動けて、疲れない。人よりも速く動けて、何回でも同じことを正確に繰り返せます。まさに機械であるが故の能力です。
そうしたフィジカルな能力はどう人の役に立つのか、一言でいうと「自己犠牲」です。自己犠牲こそが、ロボットが持つ最大のアドバンテージだと強調したい。人間なら痛いこと、苦しいことも機械なら文句も言わずに働きます。そこに我々が良心の呵責を感じる必要もないし、感じてはいけない。
--------感じてはいけない?
金岡博士 そう、可愛らしいロボットに僕が違和感を覚えるのはそこなんです。ロボットの最も重要な機能は自己犠牲なのに『こんなに愛らしいロボットにこんな辛いことをさせるなんて』などと人に思わせてしまったら、その機能が発揮されなくなります。
かわいい動作をするだけの愛玩用ロボットがいても別に構いませんが、それは我々がつくろうとしているロボットとは違うということは理解してほしいですね。
{kind=link}

ロボットが活用される社会システムまで視野に入れている
--------ロボットが人の役に立てる分野というと、かなり幅広いですよね。
金岡博士 そうですね。人が身体的な苦痛を伴う作業を強いられている分野はすべて対象になると考えています。
当面の重要な分野としては土木・建築や物流・運搬です。特に、自動化しにくい部分、人の判断が求められる部分は、MMSEの得意とするところです。
--------判断は機械ではなく人に委ねるということは、ロボットを操作する人によって、パフォーマンスも変わるのですか。
金岡博士 はい。それが重要だと思っています。よく「誰が扱っても上手にできる」という謳い文句がありますが、誰がやっても同じならコンピューターがやればいいでしょう。
人が操作する以上は、その人が動かすからこそ最大の効果を発揮できるようにつくらなければなりません。オペレーターが習熟すればするほど効率よく作業できるようになるロボットでなければ、コンピューターではなくあえて人が操作する意味がありません。
{kind=link}

--------ロボットを操作する人には、どんな能力が求められるのですか。
金岡博士 周囲の状況を的確に判断して、適切な時に適切な操作ができる能力です。ロボットが出す力は調整できるので、定量的な意味での身体能力は必要ありません。
パワーステアリングができて、女性でも大型トラックを動かせるようになりましたよね。オペレーターに必要なのはロボットに何ができるのかを理解していて、状況に応じて適切な操作を実行できる判断能力です。
--------操作で練習が必要なのはどんなところですか。
金岡博士 我々のMMSEにはマスタスレーブという技術を使っています。「マスタ」はオペレーターが操作をする司令塔部分、「スレーブ」はマスタの指令を受けて実際に作業をする実行部分のことです。
オペレーターが自分の体を動かす感覚と、スレーブロボットを動かす感覚は違います。従来はそのギャップを補正して、自分の体を動かす感覚のままでスレーブロボットを操作できることが理想とされていましたが、我々は感覚の違いを消さないことにしました。すると、オペレーターはスレーブロボットの動きやその反動に慣れる必要があります。そこに熟練の技が生まれるわけです。
なぜスレーブの感覚を残したかというと、適切な状況判断には本物の感覚、臨場感が大切だからです。車の教習でドライブシミュレータを使うとすぐ衝突しますよね。でも、実車ではそう簡単にはぶつかりません。その差が臨場感です。
また、同じく臨場感を重視するために、我々は「遠隔操作型」ではなく、「近接操作型」あるいは「搭乗型」のマスタスレーブシステムを作ります。画面からの情報しかない遠隔操作とは違い、現場にオペレーターがいれば、画面越しでは伝えきれない振動や温度、湿度、匂い、空気の流れといった場の雰囲気を全身で感じとることができます。
人間のコントロール能力を活かすためには、オペレーターが現場にいる近接操作型や搭乗型のロボットの方がより高度なパフォーマンスが発揮できるはずです。
--------すると、訓練を積んだロボットオペレーターという職業もうまれそうですね。
金岡博士 その通りです。我々は単にロボットを売るだけではなく、新たな産業のカテゴリーをつくろうとしています。
たとえば、自動車は、製造・販売から修理、関連用品、インフラまで一大産業をなしています。株式会社人機一体は、オペレーターの育成や免許制度、ロボット操作のガイドラインやインフラ整備まで含めて、ロボットを社会で活用する仕組み全体をつくります。
安全を確保するためのガイドラインは定めた上で、使う人の技術や発想次第でいかようにも活用できるものにしていきたいですね。
--------ビジネス化されたのは、それを目指していたからですか?
金岡博士 社名を「人機一体」と変えて新しくスタートしようとしているのは、まさにそのためです。やろうとしていることが大学の研究の範囲ではカバーできなくなり、会社という組織で活動することにしました。
研究としては評価されていても全く使われない技術もあります。まあ、私の研究は、研究としてもあまり評価はされていないのですけどね(笑)。私にとって大切なのは研究として評価されるかどうかではなくて、人の役に立つかどうか。そして役に立っているかどうかは、お金を出してでも使う人がいるかということが指標になります。
我々がつくるロボットを安値で買い叩くことなく、喜んで買ってくれる人がいるかどうか、世に問うてみたいですね。
--------博士は最終的なゴールとして人の幸せまで見据えているそうですね。
金岡博士 皆が幸せになるためには、誰もがロボットの機能にアクセスできるようにしないといけません。アプリ開発のように簡単にコピーできるものではないですから、ロボットを世の中に行き渡らせるためには、ビジネスとして成り立たせ、一大産業分野を構築することが必要です。
多くの人をビジネスに巻き込み、ロボットを製造・運用するシステム全体で雇用と利益を生むようにしたい。今の社会の隙間に無理矢理ロボットを押し込むのではなく、ロボットが当然の要素として組み込まれた社会のエコシステム全体を再デザインしようと思っています。
{kind=link}

18ヶ月以内に3m級の人型重機が完成する
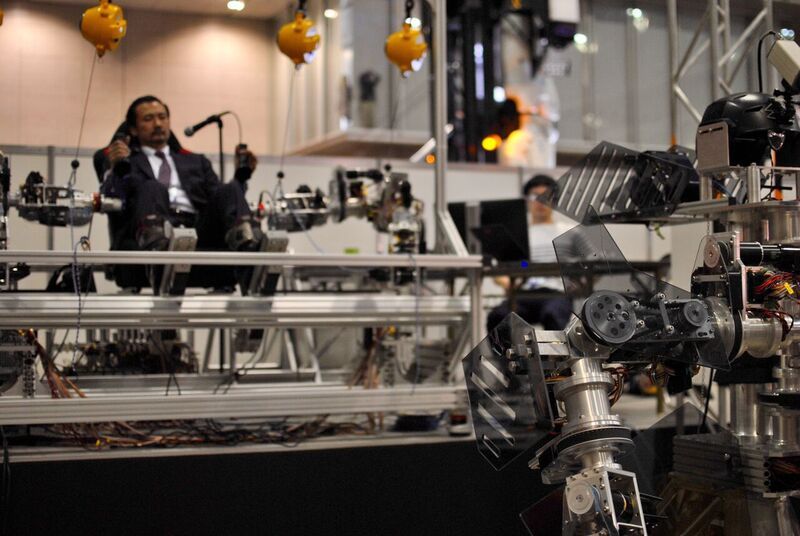
--------今、博士の構想を具体的にイメージする上で参考にできるものは、博士が以前、テレビ番組「リアルロボットバトル」(日本テレビ系)に出されたロボット「MMSEBattroid」でしょうか。
金岡博士 今、我々が持っている試作機のなかではイメージに一番、近いですね。スレーブの機能の基礎については完成しています。ただ、MMSEBattroidは厳しい制約のなかでどうにか完成させたものであり、決して満足していません。
もっと直感的に操作できるようにしたいのですが、今のMMSEBattroidで実現できているのは一部分です。メカをきちんとつくりこめば、もっと直感的に操作できるロボットになることは分かっています。足りないのは技術ではありません。人、金、時間、といったリソースが、ほんの少し、足りないだけです。
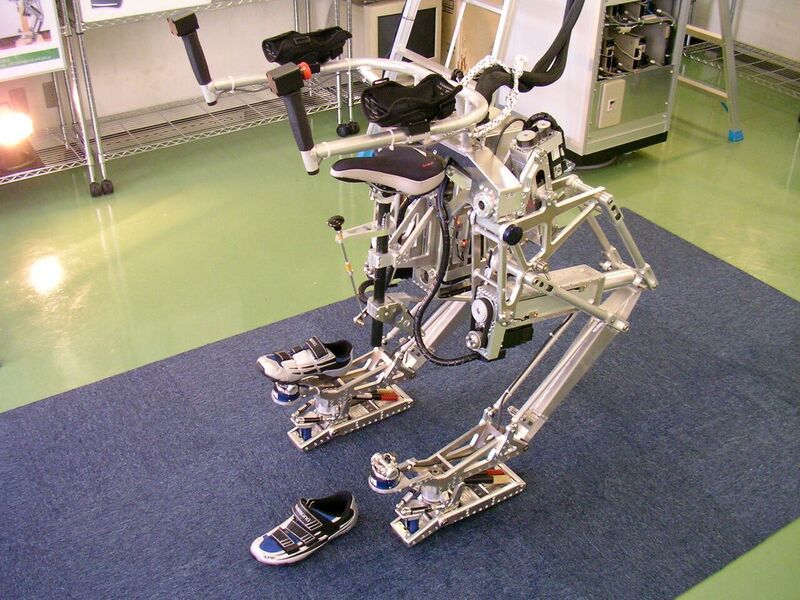
それから、MMSEBattroidは車輪で動いていましたが、足は実装したい。今、開発している試作機には足があります。
--------「足」が重要なのですか。
金岡博士 人型ロボットは見た目がキャッチーだという面ももちろんありますが、それ以上に重要な理由があります。
今のヒューマノイドの足はもっぱら移動手段として使われます。私は武道もやりますが、その観点からいうと足は決して移動だけに使うものではありません。どんな上半身の動作にも、必ず下半身の動作が伴います。全身が、ロボット工学でいうところの多リンク系として連動してこそ、スキルを発揮できるのです。
分かりやすい例を挙げれば、重いものを持ち上げるとき、手だけで持つのと腰を入れて持つのでは大きく違う。人は全身を連動させることでスキルを発揮します。人体全身を力学的に高度に連携させる制御能力を持つ人が「熟練者」です。
我々は、マスタスレーブシステムによって人体とロボットを繋ぐことで、ロボットボディを力学的に高度に連携させる制御能力を持つ「新たな熟練者」をつくろうとしています。そのためには、ロボットボディにおいても「全身」を使えるようにしなければなりません。
--------18ヶ月以内に足のあるロボットが誕生するとか。
金岡博士 はい、株式会社人機一体が人型重機の試作一号機を完成させる予定です。そのために必要な最低限のリソースを何とか確保することができました。これは3m級の人型マスタスレーブシステムであり、不整地二足歩行が可能です。歩かせるだけなら、2〜3時間も練習すれば慣れるのではないでしょうか。
試作一号機はまだ搭乗型ではなく、実用機でもありません。人型重機のフィージビリティスタディと、社会実装に向けてのコンセンサスを得るためのデモンストレーション、資金調達のための広報活動に使います。
その後、安全性の検証や実用化のためのブラッシュアップを重ねて、2020年までにはオペレーターが搭乗して操作する5m級の人型重機を、実用化試作機として完成させる予定です。
{kind=link}

「ロボットが人の職を奪う」という議論そのものが間違い。ロボットは機械。本当に愛すべきなのは何?
--------ITや人工知能が人の仕事を奪うと考える人もいますが、搭乗型なら職が失われることもないですね。
金岡博士 社会は人がいるからこそ成り立つものです。ロボットに人の役割が奪われる、という危機感は、社会を成り立たせる「手段」としてしか人を扱っていないことの証左です。つまり、人より有能な「手段」としてロボットが登場すれば、人は手段として無価値となり、その役割を失ってしまうと。でも、私に言わせれば、そのような危機感はそもそも間違っている。
人は、社会の手段ではなく「目的」なのです。存在理由と言ってもいい。社会は、人が幸せになるために、人が英知を集めてつくった「機関」です。ロボットの進歩という「英知」が人を不幸にするならば、ロボットそのものではなく、ロボットの社会実装の方法が本末転倒なのです。ロボットは本来、自らを犠牲にすることで人を幸せにするためにつくられた存在なのですから。
職を奪われる危機感などではなく、「ロボットがある社会」でどうすれば人を幸せにできるかについて、皆で知恵を絞りませんか。「ロボットを犠牲にすること」に妙な罪悪感を覚える必要はありません。
むしろ現代社会の豊かさが、一部の人々にフィジカルな苦役を強いていること、つまり誰かの苦痛の上に成り立っていること、そしてそれを直視せず、見て見ぬ振りをしていることの方にこそ罪悪感を覚えるべきです。
冒頭の「Pepperは道化」という言葉は「強すぎる」と不快に思われた方もおられるでしょう。でも、「あれがロボットだ」と言うのは、私にとっては、フィジカルな苦役を強いられている人々を尻目に、オモチャロボットを作って遊んでいるように思えてならないのです。
Pepperの特徴は「感情を持つこと」だそうですが、自己犠牲の観点からは、それは最もしてはいけないことではないでしょうか。「お願いだから傷つけないで」などと感情豊かに哀願するロボットに、自己犠牲を強いることなどできますか?
金岡博士 今、世界には人が幸せになれるだけの「力」はないと思うんです、経済的にも政治的にも。あるいは、力はあっても適切に配分できていないと言うべきでしょうか。知恵やリソースが潤沢にあってうまく社会を回していけるならいいけれども、現状では限られたリソースしかありません。
そのなかで皆が幸せになれるようにするなら、かわいいだけのロボットに大きなコストをかけている暇はない、と私は思います。
ロボット大国と言われる日本でも開発できるロボットの数は限られています。そういう意味で、エンターテイメントより、もう少し人の役に立つ方向を重視するべきではないかと問いかけたい。
日本がエンターテイメント向けのロボットに取り掛かっている間に、世界の大国がロボットの技術を上げて大きな力を持つことへの恐れもあります。
--------ロボットが良からぬことに使われるということでしょうか。
金岡博士 彼らには彼らの正義があるので軽々しい善悪の判断はできませんが、軍を持つ大国がそういう絶大な力を持ったら当然、軍事用途に使うでしょう。
私はロボットを軍用にすること自体は否定しませんが、無制限に使っていいとも思わない。力には使うべきときと場所、目的があります。他者を圧倒するためだけにロボットが利用されることは望ましくない。
日本の平和ボケしたところって私は好きなんです(笑)。日本が能天気に、争いではなく世界の発展、人類の幸福のためにロボットを使いましょうよとリードしていくのは悪くないと思います。
役に立つ技術を開発すれば軍事転用されてしまうのは避けられないことですし、そこで開発者が「軍事には使わせない」と言ったところで無力です。それなら、どうしようもないことに力を傾けるよりも、ロボット技術を日本で、民間で育てて世界に出していく、平和ボケした日本が「一番を取りつづける」ことでロボット技術の発展と利用をコントロールしていくことが大事だと思います。
{kind=link}

--------人馬一体ならぬ人機一体ということですが、人と機械の相乗効果で人が幸せになれる社会をつくっていくために、多くの人の力が必要ですね。
金岡博士 そうですね。ロボット技術の発展において日本が主導権をとり続けることまで視野に入れれば当然、今の組織のままでは実現できません。
会社も大きくしないといけないですし、利益も出さないといけない。経済的、政治的な協力関係を広く築いてゆくことも必要です。
我々にとってロボットをつくるのはあくまでも手段で、機械を使って人が幸せになるための方策を考えて実行することが使命です。
この社会から機械がなくなることはないでしょう。機械は敵ではありません。が、対等な仲間でもない。冒頭に述べたように、ロボットは人間のためにつくられ、犠牲となって壊れて消えていくのが役目です。
我々がやるべきことは、そこで妙な感傷に浸ることではなく、本当に愛すべき人、本当に愛すべき生命に愛情を注ぐこと、そのためにできることを愚直に実行することです。
機械に「自己犠牲」の機能をきちんと与え、それを社会に普及させることができれば、株式会社人機一体が会社として、ビジネスとして社会の利益、人類の幸福に貢献できると考えています。
(2016年2月16日「QREATORS」より転載)